ಸ್ವಯಂಚಾಲಿತ ಸಕ್ರಿಯ ಅಳತೆ ಉಪಕರಣ
ಉತ್ಪನ್ನ ಅಪ್ಲಿಕೇಶನ್
ಮುನ್ಸೂಚಕ ನಿಯಂತ್ರಣಕ್ಕೆ ಅನ್ವಯವಾಗುವ ಹೊಂದಿಕೊಳ್ಳುವ ವ್ಯವಸ್ಥೆಯ ಮುನ್ಸೂಚಕ ನಿಯಂತ್ರಣವು ಸಂಸ್ಕರಣೆಯಲ್ಲಿ ಮಾಪನ ಮತ್ತು ಸಂಸ್ಕರಣಾ ಮಾಪನವನ್ನು ಸಂಯೋಜಿಸಿ ಯಂತ್ರೋಪಕರಣದ ಸಂಸ್ಕರಣಾ ಸ್ಥಿತಿಯನ್ನು ನಿಯಂತ್ರಿಸಲು ಮತ್ತು ಸಂಸ್ಕರಣಾ ತ್ಯಾಜ್ಯದ ನಿಯಂತ್ರಣ ವ್ಯವಸ್ಥೆ ಇಲ್ಲ ಎಂದು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ಮುಚ್ಚಿದ-ಲೂಪ್ ಮಾಪನ ವ್ಯವಸ್ಥೆಯನ್ನು ರೂಪಿಸುತ್ತದೆ. ಸಂಸ್ಕರಣೆ ಮತ್ತು ನಂತರದ ಸಂಸ್ಕರಣಾ ಮಾಪನವನ್ನು ಸಮರ್ಥವಾಗಿರುವ ಕನಿಷ್ಠ ಮುಚ್ಚಿದ-ಲೂಪ್ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ನಿಯಂತ್ರಕದೊಂದಿಗೆ ಯಂತ್ರೋಪಕರಣದ ಹೊಂದಿಕೊಳ್ಳುವ ನಿಯಂತ್ರಣವನ್ನು ಸಾಧಿಸಬಹುದು. ಕಂಪ್ಯೂಟರ್ನೊಂದಿಗೆ ಅಳತೆ ಉಪಕರಣ, ಮೇಲಿನ ಯಂತ್ರ ಮತ್ತು ಕೆಳಗಿನ ಯಂತ್ರದೊಂದಿಗೆ ಮತ್ತಷ್ಟು ಸಂವಹನ, ಸ್ವಯಂಚಾಲಿತ ರೇಖೆಯ ಒಟ್ಟಾರೆ ಏಕೀಕೃತ ನಿರ್ವಹಣೆಯನ್ನು ಅರಿತುಕೊಳ್ಳಬಹುದು. ಆದ್ದರಿಂದ ನೀವು ತ್ಯಾಜ್ಯವನ್ನು ಸಂಸ್ಕರಿಸದೆ ಹೆಚ್ಚು ಪರಿಣಾಮಕಾರಿಯಾದ ಸ್ವಯಂಚಾಲಿತ ಉತ್ಪಾದನಾ ಮಾರ್ಗವನ್ನು ನಿರ್ಮಿಸಬಹುದು. ಹೆಚ್ಚುವರಿಯಾಗಿ, ಪತ್ತೆಗಾಗಿ ವಿಭಿನ್ನ ಬಾಹ್ಯ ವಸ್ತುಗಳಿಗೆ ಅನುಗುಣವಾಗಿ ವಿವಿಧ ಸಂವೇದಕಗಳು, ಇಡೀ ವ್ಯವಸ್ಥೆಯು ಬಾಹ್ಯದಿಂದ ಪ್ರಭಾವಿತವಾಗಿಲ್ಲ ಎಂದು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಬಹುದು.
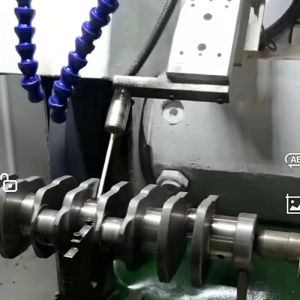
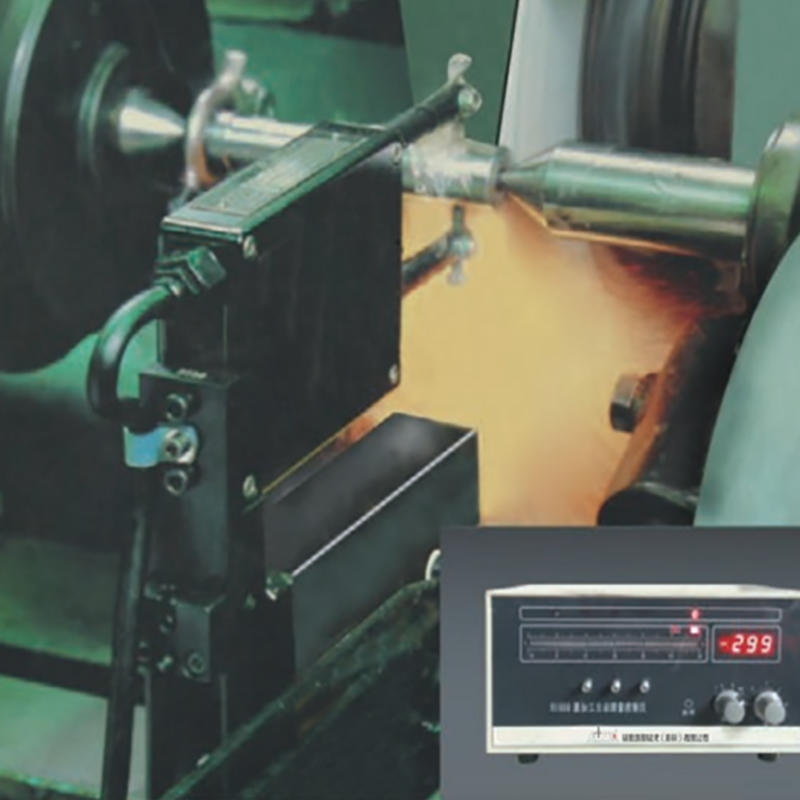
ಸಕ್ರಿಯ ಮಾಪನದ ಇಂಡೆಂಗ್ ಪ್ರಕ್ರಿಯೆ ಸಂಸ್ಕರಣೆಯ ಸಮಯದಲ್ಲಿ, ಅಳತೆ ಸಾಧನವು ಯಾವುದೇ ಸಮಯದಲ್ಲಿ ವರ್ಕ್ಪೀಸ್ ಅನ್ನು ಅಳೆಯುತ್ತದೆ ಮತ್ತು ಮಾಪನ ಫಲಿತಾಂಶಗಳನ್ನು ನಿಯಂತ್ರಕಕ್ಕೆ ಇನ್ಪುಟ್ ಮಾಡುತ್ತದೆ. ಪೂರ್ವ-ಸೆಟ್ ಸಿಗ್ನಲ್ ಪಾಯಿಂಟ್ನಲ್ಲಿ, ನಿಯಂತ್ರಕವು ಯಂತ್ರ ಉಪಕರಣದ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ನಿಯಂತ್ರಿಸಲು ಸಂಕೇತವನ್ನು ಕಳುಹಿಸುತ್ತದೆ. ಉದಾಹರಣೆಗೆ, ಗ್ರೈಂಡಿಂಗ್ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ, ಒರಟಾದ ಗ್ರೈಂಡಿಂಗ್ ಫೀಡ್, ಮೊದಲ ಗಾತ್ರದ ಸಿಗ್ನಲ್ ಪಾಯಿಂಟ್, ನಿಯಂತ್ರಕ ಸಂಕೇತಿಸಿದಾಗ, ಯಂತ್ರ ಉಪಕರಣವು ಒರಟಾದ ಗ್ರೈಂಡಿಂಗ್ನಿಂದ ಉತ್ತಮ ಗ್ರೈಂಡಿಂಗ್ಗೆ ಬದಲಾಗುತ್ತದೆ, ಎರಡನೇ ಗಾತ್ರದ ಸಿಗ್ನಲ್ ಪಾಯಿಂಟ್, ಯಂತ್ರ ಉಪಕರಣವು ಸೂಕ್ಷ್ಮ ಗ್ರೈಂಡಿಂಗ್ ಫೀಡ್ನಿಂದ ಲಘು ಗ್ರೈಂಡಿಂಗ್ಗೆ ಬದಲಾಗುತ್ತದೆ (ಸ್ಪಾರ್ಕ್ ಗ್ರೈಂಡಿಂಗ್ ಇಲ್ಲ), ಮೂರನೇ ಸಿಗ್ನಲ್ ಪಾಯಿಂಟ್, ವರ್ಕ್ಪೀಸ್ ಮೊದಲೇ ಹೊಂದಿಸಲಾದ ಗಾತ್ರಕ್ಕೆ ಬಂದಾಗ, ಗ್ರೈಂಡಿಂಗ್ ಚಕ್ರವು ತ್ವರಿತವಾಗಿ ಹಿಂತಿರುಗುತ್ತದೆ ಮತ್ತು ಮುಂದಿನ ಚಕ್ರದ ಸ್ಟ್ಯಾಂಡ್ಬೈ ಸ್ಥಿತಿಯನ್ನು ಪ್ರವೇಶಿಸುತ್ತದೆ.
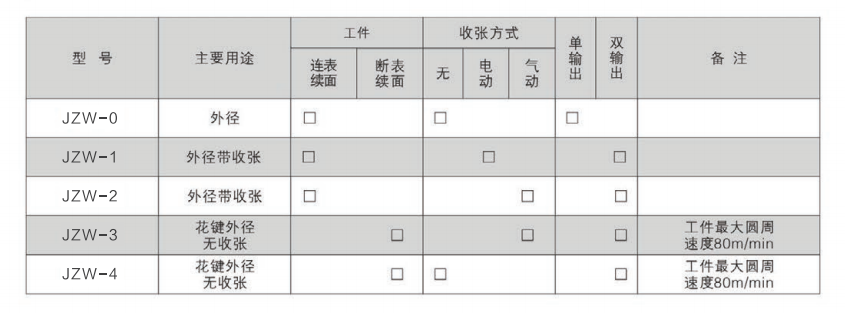
ಉತ್ಪನ್ನ ನಿಯತಾಂಕ
ಉತ್ಪನ್ನ ವೀಡಿಯೊ

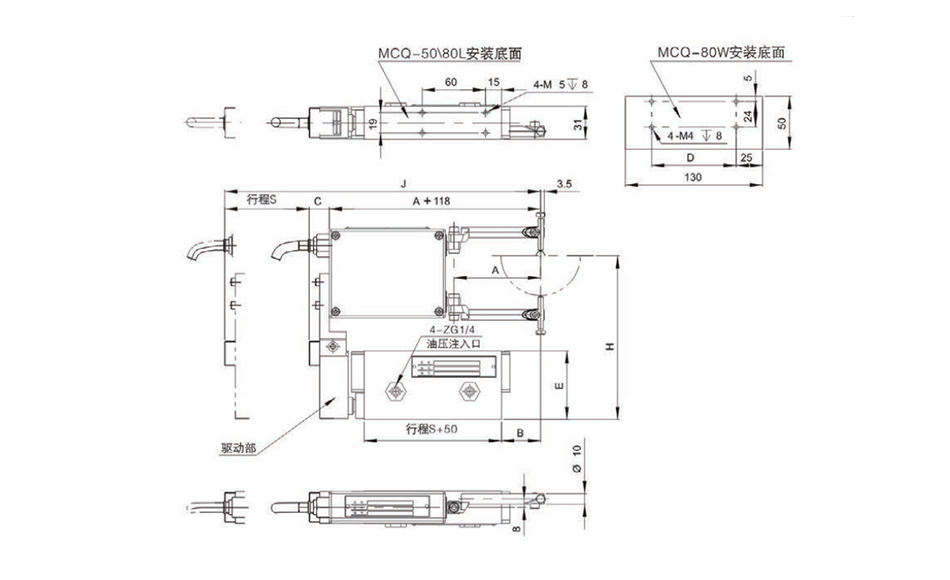
ಉತ್ಪನ್ನದ ಗಾತ್ರ